
[ Example CANBus dev stack using a Raspberry Pi ]
In-vehicle Raspberry Pi rig used to run the scripts on the Car Hacking parent page. Designed for permanent JEEP installation: two CAN buses captured simultaneously, graceful sleep / wake on the vehicle's 12V, survives crank brown-outs, quiet enough to run unattended for weeks at a time. This isn't the only way to build an in-vehicle CAN rig — a USB-CAN dongle on a laptop works fine for a desk session — but each piece of the stack below addresses a specific failure mode you hit when you try to leave a Pi in a vehicle long-term.
[ Parts ]
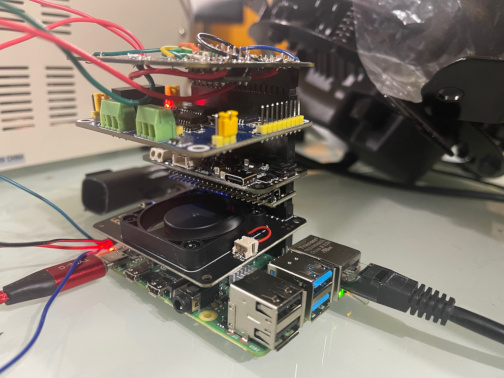
1. Raspberry Pi 4b (2GB) Sweet spot for in-vehicle use -- enough CPU for candump on a 500 kbps CAN-C bus plus a logger running alongside without dropping frames. Pi Zero / Zero 2 W can keep up on CAN-IHS alone but bottleneck when both buses see traffic simultaneously. Pi 5 works too but draws more current at idle, which matters more when you're running off the vehicle's 12V than at a desk. 2. Argon Fan HAT (software-controlled CPU fan) Vehicle ambient swings hard -- 130°F+ on a parked-in-sun afternoon, sub-freezing in winter. Software-controlled fan lets you ramp by sensor-temp instead of running the fan 24/7. Quiet at idle, loud only when it needs to be. Without the fan, the SoC will still automatically throttle to keep operating temps within a safe operating range -- but in a sealed enclosure on a 130°F dash, throttling will be heavy and sustained. The fan is the difference between full-speed logging in summer vs. a 600 MHz Pi that's missing CAN frames. 3. Horizontal GPIO connector Stacks the HATs sideways instead of vertically -- better airflow over the SoC, lower total profile so the assembly fits under-seat or in tighter dash voids. Optional — vertical stacking still works, just hotter and taller. 4. Zero2Go Omni The critical piece for in-vehicle work. See Why Zero2Go below for the full rationale. Short version: vehicle 12V drops to ~6-8V during crank; direct USB-powered Pis brown out and corrupt SD cards. Zero2Go Omni has supercaps for crank ride-through plus clean shutdown when the vehicle truly sleeps (drops to <5V for >30s) so the Pi flushes its I/O before losing power. Pairs with Blackbox_monitor.sh, monitor.sh, and autocollect.sh for the ignition-tied recorder lifecycle on the software side. 5. Waveshare 2-Channel CAN HAT Two MCP2515 controllers -- one for can0 (CAN-IHS at 125 kbps), one for can1 (CAN-C at 500 kbps). Mirrors the topology of a real FCA vehicle, so the scripts on the parent page (which assume "can0 = IHS, can1 = C") work without modification. Single-channel HATs work if you only need one bus. The MCP2515 caps out at about 1 Mbps on the SPI side; for 500 kbps CAN-C bus traffic that's plenty of headroom. Faster CAN FD work would want a different controller. 6. Homebrew Logic Level Converter (3.3V -> 5V) The Pi's 3.3V GPIO can't drive 5V data lines on WS2812-style RGB strips reliably -- works at short cable runs, gets flaky as the data line gets longer. A 74AHCT125 buffer (or similar) shifts 3.3V -> 5V for the data line; the RGB strips in jmccorm's rig use this for clean signal at any cable length. Not strictly required for CAN work; required if you're driving any 5V-data peripherals from the same Pi. 7. 40-pin stacking headers Pass the GPIO bus up through each HAT so the stack can grow without conflicts -- each HAT reads only the pins it cares about. Standard 2x20 stacking headers off Amazon / Adafruit / the Pi Hut work fine. Total parts run somewhere around $200-250 new (Pi 4 + 2-ch CAN HAT + Zero2Go Omni + Argon are the load-bearing items). Buying used brings it well under $150. The Python CAN Bus Lab Guide on the Guides & Tutorials page covers how to bring up the same software stack on virtual CAN if you want to develop without the hardware first.
[ Why Zero2Go specifically ]
The Zero2Go Omni is the one piece of this stack that's not substitutable. Three vehicle-specific failure modes it addresses:
1. Crank brown-out Starting the engine pulls hundreds of amps through the starter motor. Vehicle 12V sags to ~6-8V for ~200 ms while this happens. A Pi powered directly off vehicle 12V (via cigarette-lighter adapter or fuse-tap regulator) sees this as an input-voltage undershoot and either resets or browns out mid-write. If the SD card was being written when the brown-out hit, you get filesystem corruption. Zero2Go Omni has supercaps that ride through the dip -- ~200 ms of stored energy is plenty to bridge a crank event without the Pi noticing. 2. Vehicle sleep / clean shutdown When the vehicle is parked and locked, the BCM eventually enters a low-power state and cabin 12V drops below the threshold that Zero2Go considers "running". Zero2Go gives the Pi a configurable grace period (default ~30 seconds) of battery-backed power BEFORE cutting it -- enough for systemd to run shutdown handlers and the SD card to flush. On the software side, autocollect.sh'sengineshutdownhook explicitly callssync; sync; sleep 5; sync; syncto ensure the filesystem is committed before the Zero2Go cuts power. Without the grace period, that hook would never run -- the Pi would just die. 3. Unpredictable power loss Battery disconnect for repair, blown fuse on the accessory circuit, alternator failure during a drive. Same SD-corruption risk as crank brown-out, but unannounced. Same supercap solution -- you get ~200 ms to ~1 s of ride-through depending on the load, which the autocollect engineshutdown hook can use to flush.
Alternatives exist (UPS HATs with LiPo backup, custom DC-DC converter + supercap setups, even a small lead-acid pack), but Zero2Go Omni is the cheapest off-the-shelf solution that's documented to handle all three modes. See the In-Vehicle Event Handlers reference guide for the software-side discipline that pairs with this hardware.
[ Software pairing ]
The hardware above is meaningless without the software that uses it correctly. The natural pairings:
Hardware feature Pairs with ---------------------------- ----------------------------------- Zero2Go grace period Blackbox_monitor.sh stops the CAN recorder cleanly on ignition off monitor.sh top-level orchestrator -- also does CPU governor + autocollect + autohvac autocollect.sh engineshutdown hook for sync-and-flush Waveshare 2-CH HAT Every script on the parent page that uses both can0 and can1 (Remote_WiFi, monitor, autocollect, pyJeepCan, ...) Argon fan + CPU governor Blackbox_monitor.sh / monitor.sh switch governor between powersave (parked) and ondemand (engine running) Logic level converter RGB strip control (e.g. the blinker-mirror Python consumer of lights.sh) Generally In-Vehicle Event Handlers reference guide -- covers the software disciplines that turn this hardware into a system that survives weeks of unattended operation